
|
Реклама... |
|
Как отмечалось в гл. 1, идея планирующего полета высказывалась еще в XVII в. в работе английского ученого Д. Уилкинза "Математическая магия". В начале XIX столетия немецкий исследователь А. Захария писал, что человек сможет подражать парящим птицам с помощью "летающих челнов", стартующих с возвышенных точек [383 ]. Возможность планирования с помощью неподвижного крыла была доказана на опытах с моделями. Однако это не вызвало никакого интереса, так как сама идея планера казалась совершенно бесперспективной для решения проблемы полета человека.
Определенным стимулом к началу работ по планерам послужило развитие парашютного спорта. Прыжки на парашюте с аэростата являлись весьма распространенным аттракционом, и в середине XIX в. появились предложения сделать эти спуски управляемыми. Для этого необходимо было заменить купол наклонно установленной плоскостью и применить рули для управления спуском.
Впервые конструкция летательного аппарата, предназначенного для управляемого полета после подъема на воздушном шаре, была опубликована в 1835 г. в работе немецкого механика Г. Ребенштейна [343 ]. В основу проекта была положена фантастическая идея: аэростат кубической формы после набора высоты может быть превращен в прямоугольное крыло (рис. 5.1). С помощью этого крыла предполагалось осуществить планирующий полет продолжительностью более 1 ч. и дальностью свыше 30 км. Управление во время спуска должно было осуществляться изменением угла установки крыла и отклонением руля направления.
Рис. 5.1. Проект Г.Ребенштейна
Более реальным был проект "управляемого парашюта", предложенный в 1852 г. Д. Кейли [172]. Аппарат (рис. 5.2) представлял собой моноплан с площадью крыла 42 м2. Как и мускулолет 1849 г., он имел два хвостовых оперения - для стабилизации и управления. Для обеспечения устойчивости предусматривалось переднее расположение центра тяжести, установка горизонтального оперения под отрицательным углом атаки, поперечная V-образность крыла (на рисунке не показана). Расчетный вес аппарата с человеком составлял 135 кг, скорость снижения - 5 м/с. Конструктора мало привлекала идея планирующего полета, поэтому проект так и остался на бумаге.
Идея "управляемого парашюта" была реализована через год после появления проекта Д. Кейли. Аппарат, предназначенный для управляемых спусков с аэростата, построил во Франции в 1853 г. Л.-Ш. Летур. К сожалению, Летур не последовал рекомендациям английского пионера авиации и его аппарат представлял собой крайне несовершенную конструкцию, не имевшую ничего общего с современным планером. "Управляемый парашют" Летура имел крыло в форме зонтика с изменяемым углом установки в полете; для управления по курсу был предусмотрен руль направления; имелись также два "весла", приводимых в движение человеком. Из-за низкого аэродинамического качества поступательная скорость при спуске была очень мала, что вело к неэффективности органов управления. Было несколько благополучных спусков во Франции и в Англии. Но вскоре (27 июня 1854 г.) произошла катастрофа и Летур погиб, ударившись о деревья при приземлении [187, с. 46].
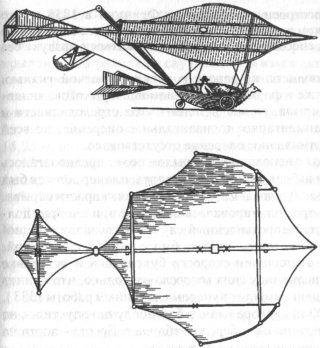
Рис 5.2. "Управляемый парашют" Д.Кейли
Из-за неудачной конструкции аппарат Летура был неспособен к планирующим полетам и спуски на нем, конечно, не следует рассматривать как первые полеты на планере. Тем не менее эксперименты отважного парашютиста, явившиеся первыми в истории авиации публичными демонстрациями планирующих спусков с помощью неподвижного крыла, сыграли определенную роль в развитии безмоторного полета, способствуя появлению более совершенных аппаратов типа планера.
Попытки полета на крыльях после подъема на воздушном шаре происходили и в последующие годы. Практика показала неоправданность экспериментов такого рода. В годы, когда расчет на прочность аппаратов тяжелее воздуха еще не был известен и не было опыта в технике пилотирования таких аппаратов, спуск с большой высоты приводил к гибели смельчаков. Печальную судьбу Летура разделили бельгиец В. де Груф, конструктор аппарата с машущими крыльями (1874 г.), и американский планерист Д. Малони (1905 г.).
Во второй половине XIX в. наблюдения за планирующим и парящим полетом птиц навели естествоиспытателей на мысль о создании планеров иного типа. В отличие от планера-парашюта Летура эти аппараты строились по образцу птицы с неподвижно распростертыми крыльями и уже имели сходство с современными планерами. Они предназначались для полетов за счет использования силы ветра (1).
(1) Парящий полет привлекал к себе внимание и раньше, однако долгое время господствовали неверные объяснения его механизма. Полагали, что птица поддерживает себя в воздухе быстрыми, незаметными для глаза взмахами крыльев, что высоко летающие птицы не подвержены действию силы тяжести, что тело природных летунов обладает аэростатической подъемной силой [31,с.57-58; 173,с.99; 189; 379, с. 249]. Таким образом, преобладало мнение, что птица (а следовательно, и сделанный по ее образцу летательный аппарат) не может держаться в воздухе за счет движения атмосферных потоков. Только во второй половине XIX в. благодаря исследованиям д.Эстерно, Н. А. Арендта, А. Пено и других естествоиспытателей было установлено, что истинной причиной парящего полета является вертикальное перемещение воздушных масс, и доказана теоретическая возможность создания безмоторного аппарата-парителя.
Первый планер-паритель был построен и испытан во Франции в 1856 г. Его создатель, Ж.-М. Ле Бри, был моряком и в качестве прототипа аппарата был выбран альбатрос - крупная морская птица, способная долгое время держаться в воздухе без взмахов крыльями.
Конструкция планера была выполнена из дерева и обтянута легкой тканью. Летчик располагался стоя в фюзеляже в форме лодки. С помощью рычагов, являвшихся продолжением лонжеронов крыла, он мог изменять угол стреловидности и наклон несущих поверхностей. Рудиментарное горизонтальное оперение, по всей видимости, было неподвижным. Вертикальное оперение отсутствовало.
На первых летательных аппаратах с неподвижным крылом полет предполагалось начинать с прыжка с высоты. Ле Бри избрал другой метод старта: планер должен был буксироваться на повозке, запряженной лошадьми, до достижения скорости отрыва. После подъема в воздух буксирный трос планировалось перерезать, и аппарат должен был совершать свободный полет. Непредвиденный случай не позволил полностью осуществить задуманное. Трос, которым планер был соединен с повозкой, зацепился за сиденье кучера. При увеличении скорости буксировки и установке крыльев под большим углом атаки подъемная сила возросла настолько, что планер поднялся в воздух, унося с собой и сиденье вместе с кучером (по данным работы [333 ], аппарат взлетел на высоту около 100 м). Вскоре планер благополучно опустился на прибрежный песок (испытания проходили на побережье вблизи г. Бреста - порта на западе Франции). Кучер и сам экспериментатор не пострадали.
После небольшого ремонта планера в 1857 г. Ле Бри предпринял вторую попытку полета. На этот раз планер должен был запускаться с возвышенности против ветра, как стартуют крупные птицы. На высоте около 40 м была установлена Г-образная конструкция, к которой подвесили аппарат. При взлете планер оттянули назад и затем отпустили. Во время обратного хода конструктор отсоединил связующий трос, и планер устремился вперед. Однако начальный импульс оказался недостаточным для пологого планирования, и аппарат вошел в пике. Увеличив угол установки крыльев, Ле Бри удалось несколько уменьшить скорость снижения, но удар был все же сильным. При аварии планер разбился, а Ле Бри сломал ногу.
Десять лет спустя Ле Бри с помощью французских моряков построил еще один планер. Сохранилась фотография этой машины (рис. 5.3) - первое фотографическое изображение пилотируемого летательного аппарата тяжелее воздуха. В целом он напоминал первый планер Ле Бри. Основные отличия заключались в системе управления. Для перестановки крыльев помимо рычагов имелись тросы, соединенные с крылом вдоль размаха и служащие для изменения кривизны профиля; горизонтальное оперение могло отклоняться в вертикальной плоскости и управлялось с помощью педалей. Для демпфирования порывов ветра хвост имел пружинное крепление к фюзеляжу. В фюзеляже был предусмотрен перемещающийся вдоль оси груз, предназначавшийся для изменения центровки аппарата. Размах крыла планера равнялся 15,25 м, площадь - 20 м2, длина аппарата составляла около 6 м [333, с.76 ].
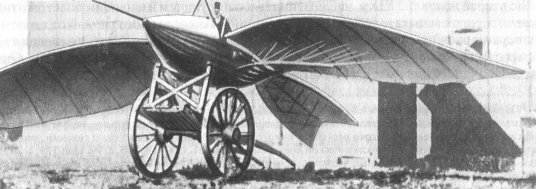
Рис. 5.3. Планер Ле Бри, 1868г.
Испытания нового планера происходили в 1868 г. при большом стечении народа. Аппарат был установлен на отделяемой тележке. Ле Бри удалось совершить короткий планирующий полет дальностью около 30 м.
Впоследствии Ле Бри дважды испытывал свой планер без пилота на полигоне Морского ведомства. Первая проба была успешной: аппарат, буксируемый матросами, поднялся на высоту около 50 м, пролетел 200 м и благополучно приземлился. Но при повторном испытании, проводившемся в ветреную погоду, планер с зафиксированными рычагами управления потерял устойчивость, упал и разрушился.
Аппараты Ле Бри являлись первыми в истории авиации планерами в полном понимании этого слова (1). Они имели удлиненное крыло, обтекаемый фюзеляж и обладали приемлемым для планирующего полета аэродинамическим качеством. Это доказывает отчасти успешный эксперимент с первым летательным аппаратом Ле Бри. Перспективным был также разработанный Ле Бри буксирный метод старта. Вместе с тем, слепо копируя облик птицы, конструктор не сумел обеспечить устойчивости и управляемости своих планеров. Это не позволило ему добиться окончательного успеха (2).
В 1864 г. во Франции была опубликована работа Ф.д'Эстерно под названием "Полет птиц" [190]. Автор ее большое внимание уделил изучению парения птиц и пришел к выводу, что при ветре можно получить неограниченную мощность и поэтому нет необходимости в искусственном двигателе. Он также сформулировал "Семь законов машущего полета и восемь законов парящего полета". Под "законами" подразумевались главным образом различные способы изменения формы крыла и хвостового оперения. В соответствии с этими положениями д'Эстерно разработал конструкцию летательного аппарата, который должен был обладать большой подвижностью крыльев и хвоста. Согласно первым трем "законам" крыло могло изменять угол установки в поперечной плоскости, угол стреловидности и угол атаки. Задняя кромка должна была быть гибкой. Горизонтальное оперение, как и крыло, шарнирно соединенное с фюзеляжем, могло перемещаться вверх-вниз, в стороны и закручиваться относительно продольной оси. Летчик размещался в фюзеляже на сиденье, которое было сделано подвижным для перемещения центра тяжести вперед-назад или в стороны. По оценке д'Эстерно, аппарат с размахом 9,6 м и площадью крыла 20 м2 должен был весить 80 кг [190, с. 60-61 ].
(1) Некоторые зарубежные авторы указывают, что первыми построенными и испытанными планерами были летательные аппараты Д. Кейли [218, с. 204; 219, с. 8], Р. де Гуэ (Франция, 1801 г.) [257, с. 13], А. Берблингера (Германия, 1811 г.) [351, с. 16]. Но на самом деле ни одна из этих конструкций не предназначалась для планирующих полетов. Аппараты Д. Кейли кроме неподвижной несущей поверхности имели приводимое в действие пилотом подвижное крыло, т. е. являлись комбинацией планера и махолета. Конструктор преследовал задачу полета с помощью мускульной силы (неподвижное крыло служило только для уменьшения потребной мощности), и короткие подлеты при испытаниях без использования машущих поверхностей рассматривались только как предварительная стадия опытов, не представляющая самостоятельного интереса. Аппараты Гуэ и Берблингера, по мнению подавляющего большинства историков авиации [ 187; 189; 358; 379], были "чистыми" орнитоптерами. Автору настоящей работы не удалось обнаружить доказательств, которые позволили бы опровергнуть это заключение.
(2) По мнению исследователя работ Ле Бри Ч.-И. Песлина, благополучному исходу при первом испытании (1856г.) во многом способствовал повисший под аппаратом кучер, сыгравший роль противовеса [333, с. 56].
Воплотить свой проект в жизнь д'Эстерно решился только в 1883 г. [173, с. 99 ]. Строительство не было завершено из-за смерти изобретателя.
На планере, спроектированном д'Эстерно, впервые был предложен смешанный балансирно-аэродинамический способ управления. Этот метод применялся на некоторых аппаратах конца XIX - начала XX веков. Однако та система управления, которая была разработана д'Эстерно, отличалась, как и на самолете Адера, чрезвычайной сложностью и была непригодна для практического использования.
В работах Ле Бри и д'Эстерно наряду с прогрессивной для своего времени идеей создания безмоторного летательного аппарата по образу птиц-парителей наблюдалось стремление скопировать не только облик, но и подвижность крыла птицы. История показала ошибочность такого подхода. Успех был достигнут при применении неподвижного, жестко соединенного с фюзеляжем крыла и использовании лишь незначительной его части для управления (элероны, аэродинамические тормоза). Это же относится и к хвостовому оперению (1).
Значительный интерес представляют планерные эксперименты еще одного французского исследователя полета птиц, Л .-П. Муйяра. Проживая в Алжире, Муйяр мог часто наблюдать за движением птиц в восходящих потоках воздуха и пришел к твердому убеждению о возможности безмоторного полета с помощью неподвижных крыльев. Для проверки своих идей Муйяр в 1856-1865 гг. построил три планера. Первые попытки планирования были неудачны, и только на планере, построенном в 1856 г., ему удалось совершить небольшой полет - 42 м [313 ].
По конструкции, методу управления и способу старта этот летательный аппарат отличался от планеров Ле Бри и д'Эстерно. Он состоял из крыла, образованного легкими деревянными нервюрами, обтянутыми полотном. Фюзеляж и хвостовое оперение отсутствовали (рис. 5.4). Человек помещался в вырезе в крыле и, опираясь на руки, должен был отклонять тело в полете, осуществляя таким образом управление планером. Вес аппарата составлял всего 15 кг. Взлет осуществлялся с небольших возвышенностей.
(1) В связи с этим уместно вновь вспомнить Л. да Винчи, который еще в XV в. пришел к выводу, что для правления удобнее "поворачивать самую малую часть крыла, нежели все крыло" [70, с. 548].

Рис. 5.4. Планер Л. Муйяра, 1865г.
На первый взгляд может показаться, что примитивные аппараты Л. Муйяра были шагом назад по сравнению с планерами его соотечественников Ле Бри и д'Эстерно. Однако это не так. Предельно простые, приспособленные к автономному старту планеры Муйяра были лучшим средством освоения пилотируемого полета на основе метода проб и ошибок, единственно возможного в рассматриваемый период. Конечно, эти аппараты были весьма несовершенны: отсутствовали средства стабилизации полета, крыло было плоским, недостаточной оказалась прочность, но все эти недостатки могли быть выявлены и устранены при многократном повторении экспериментов. Только отсутствие должного упорства не позволило Муйяру добиться того, что удалось достичь четверть века спустя О. Лилиенталю.
Несмотря на отсутствие практических успехов (за исключением одного небольшого полета в 1865 г.), Муйяр сыграл заметную роль в развитии планеризма. Его непоколебимая уверенность в возможность безмоторного полета по образу парящих птиц стимулировала работы Лилиенталя и братьев Райт. Однако идеи французского экспериментатора встретили понимание только в конце XIX в. В начале своей деятельности он, по меткому выражению одного из братьев Райт, являлся "проповедником в пустыне" [327, с. 256 ].
Отдельные попытки полета без двигателя происходили и в 1870-1880-е годы. В Германии над созданием планеров работали А. Беклин (1881-1883 гг.) (1) [358, с. 137-140 ] и А. Вольфмюллер (1885 г.) [358, с. 155-156 ]; во Франции эксперименты с планерами вели Массе и Бьо (1882 г.) [178, с. 49-134 ], А. Гупиль (1883 г.) [225 ], де Сандерваль (1886 г.) [347 ]; в Англии - Р. Харт [278 ]; в США в 1883-1886 гг. попытки планирующих полетов делал Д. Монтгомери [173, с. 248-249]. По данным работы [323 ], опыт безмоторного полета имел место даже в Южной Африке, где английский эмигрант Д. Хаузхолл в середине 1870-х годов построил и испытал планер балансирного типа.
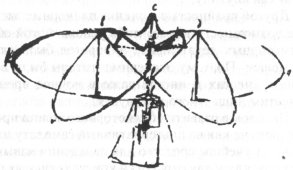
Рис. 5.5. Планер со складывающимся крылом. Эскиз Н.А.Арендта (архив музея Н.Б.Жуковского)
Отмеченные выше планеры имели в большинстве случаев монопланное крыло. Выполненные из дерева и полотна, они весили от 20 до 50 кг. На некоторых аппаратах для управления в полете предусматривалось изменение положения крыла относительно фюзеляжа. Так, на незаконченном планере Л. Муйяра (1878 г.) крыло, по замыслу конструктора, должно было изменять угол стреловидности в полете, на одном из планеров Д. Монтгомери (1886 г.) консоли крыла могли быть установлены под различными углами атаки, а на планере А. Вольфмюллера пилот с помощью цепной передачи мог перемещать крыло вдоль продольной оси аппарата. В России Н. А. Арендт предложил проект планера со складывающимся крылом (рис. 5.5) [11, №10474].
(1) Первые свои планеры (1881-1882 гг.) Беклин построил, находясь в Италии.
Большинство планерных экспериментов 1870-1880-х годов окончилось неудачно: летательные аппараты или не могли отделиться от земли или, будучи недостаточно прочными, были разрушены ветром еще до попытки полета на них. Некоторые планеры - А. Гупиля, де Сандерваля - вообще не предназначались для свободного полета и испытывались на привязи, как воздушные змеи.
На фоне скромных достижений планеристов "долилиенталевского" периода сенсационными выглядят сообщения некоторых современных польских авторов о полетах сельского жителя Польши Я. Внека на самодельных крыльях в 1867-1869 гг. [80; 260, с. 91-95]. По словам указанных авторов, Внек, стартуя с колокольни, неоднократно совершал многокилометровые полеты. Отсутствие каких-либо доказательств и техническая невозможность указанных результатов дают основания отнести данные утверждения к разряду историй типа описанных выше "полетов" Г. Уайтхеда.
Одной из причин неуспеха планеризма на начальном этапе его развития было техническое несовершенство летательных аппаратов. Первые планеры были либо неустойчивы и неуправляемы, либо не обладали достаточным для планирования аэродинамическим совершенством. В ряде случаев прочность конструкции оказывалась недостаточной.
Но основным препятствием на пути развития планеризма были даже не просчеты при проектировании (практический опыт позволил бы постепенно устранить их), а неправильная оценка возможностей безмоторного летательного аппарата: от планера ожидали длительного парящего полета, наблюдаемого у птиц. Характерно объявление, появившееся в 1868 г. в апрельском выпуске журнала "Aeronaute" в связи с ожидаемыми испытаниями планера Ле Бри: "После первых опытов Капитан-Птица (Ле Бри. - Д.С.) спустится на площадку в Порт-Наполеоне, затем оттуда в присутствии публики взлетит и в полете пересечет порт, а может быть и рейд. Он будет снабжен парашютом, чтобы спуститься в случае необходимости с высоты от 300 до 500 м, на которой он должен маневрировать в воздухе".
Из приведенной цитаты очевидно, что планер в те годы рассматривали как альтернативу управляемому аэростату или самолету, а не как аппарат для постепенного освоения техники пилотирования в небольших планирующих полетах. Поэтому в том случае, когда удавалось осуществить короткие "прыжки-полеты", это расценивали как неудачу.
Другой крайностью в оценке планерных экспериментов было априорное отрицание возможности какого-либо успеха в этой области. Деятельность конструкторов безмоторных летательных аппаратов была окружена атмосферой скептицизма и насмешек. Поэтому экспериментаторы были вынуждены проводить опыты в уединенных местах и иногда даже в ночное время, а сведения об их работах стали известны лишь много лет спустя.
Перелом в развитии безмоторного полета произошел тогда, когда на планер стали смотреть не как на альтернативный самолету или дирижаблю летательный аппарат, а как на учебное средство для овладения навыками пилотирования при планирующих спусках и для отработки конструктивных параметров аппарата с неподвижным крылом.
Одним из первых, кто высказал эту мысль, был Н. А. Арендт, основоположник идей планеризма в России. В работе "О воздухоплавании, основанном на принципах парения птиц" (1888 г,) он писал: "...нет, не может и не должно существовать такой модели авиационной машины, которую можно было бы заставить летать, не приложивши к ней умения!.. Построить прибор или машину, которая по устройству своему соответствовала бы строению летательного аппарата белки (имеется в виду белка-летяга, передние и задние лапки которой соединены перепонкой, выполняющей роль крыла. - Д. С.), бесспорно, возможно; изучить проблемы управления таким нехитрым аппаратом не может быть делом недоступным; постепенный переход от этого прототипа авиационного прибора и от этой прототипической же формы парения (под "прототипической формой парения" Арендт подразумевал планирующие спуски. -Д.С.) к формам более совершенным - вполне логичен" [9, с. 2 ].
Помимо общих соображений о роли опытов безмоторного полета в решении проблемы освоения воздуха Арендт выдвинул ряд предположений, направленных на практическое развитие планеризма в России: разработал проект планера с профилированным крылом [8, с. 26; 11, № 10474], описал конструкцию тренажера для предварительного обучения полетам [9 ]. Он мечтал о создании первой в мире "Школы летательного искусства". К сожалению, взгляды энтузиастов развития планеризма не встретили понимания и поддержки и Арендт не смог реализовать свои замечательные идеи.
Мысль об использовании безмоторного летательного аппарата для овладения техникой пилотирования нашла практическое воплощение благодаря деятельности немецкого инженера и экспериментатора О. Лилиенталя. Располагая достаточными для проведения натурных экспериментов средствами, Лилиенталь сумел осуществить то, о чем Арендт только мечтал.
Идея планирующего полета зародилась у Лилиенталя, как и у его предшественников, в результате наблюдений за полетом птиц. Для проверки своих выводов он решил приступить к практическим опытам с планерами.
Основные принципы конструирования безмоторных летательных аппаратов Лилиенталь сформулировал в 1889 г. Он писал: "Конструкция пригодных летательных аппаратов ни под каким видом не должна зависеть от создания легких и сильных двигателей... Для того чтобы летательный прибор расходовал как можно меньше работы, необходимо, чтобы он как своей формой, так и относительными размерами точно соответствовал крыльям хорошо летающих птиц... Крылья в своем поперечном сечении должны иметь вогнутость, обращенную книзу" [281, с. 147-148 ]. Балансировка планеров должна была осуществляться изменением положения центра тяжести в полете. Материалом конструкции служили ивовые прутья и полотно.
Как видно, принципы проектирования безмоторных аппаратов Лилиенталя не отличались особой новизной. Как и в большинстве построенных ранее планеров, в основу конструкции был положен облик птицы. Идеи крыла изогнутого профиля и балансирного управления также предлагались планеристами прежних лет. Основное отличие в подходе Лилиенталя заключалось в методике экспериментов. Если первые планеристы стремились сразу же осуществить полет, стартуя с возвышенности или используя другие вспомогательные средства взлета, то для Лилиенталя был характерен принцип постепенности в освоении техники полета. "От шага к шагу, от прыжка к прыжку, от полета к полету", - так охарактеризовал метод немецкого планериста один из его последователей Ф. Фербер [113, с. 44]. В первых опытах Лилиенталь стоял с крыльями на ветру, изучая действие аэродинамических сил и прочность конструкции, затем прыгал с крыльями с небольшого помоста в саду своего дома (это упражнение он повторял иногда по 50-60 раз в день) и только два года спустя решился приступить к полетам с возвышенностей высотой 5-6 м.
Постепенное усложнение задач и многократность повторения опытов позволили не только освоиться с чувством полета, но и совершенствовать конструкцию планеров. Первые летательные аппараты Лилиенталя еще не имели хвостового оперения. Они оказались неустойчивыми и недостаточно прочными. Успех был достигнут в 1891г., когда конструктор добавил к крылу вертикальное и горизонтальное оперение и уменьшил размеры крыла [229 ].
Благодаря наличию стабилизирующих поверхностей и сравнительно небольшим размерам аппарата его устойчивость и эффективность балансирного управления заметно улучшилась. На планере 1891 г. (рис. 5.6) Лилиенталю удалось совершить планирующие спуски до 20 м длиной. При взлете экспериментатор разбегался под уклон навстречу ветру. В полете он управлял планером с помощью ног, опираясь руками на крылья. При приземлении Лилиенталь резко отклонял тело назад, увеличивая угол атаки крыла, скорость полета уменьшалась и планер совершал парашютирующую посадку.
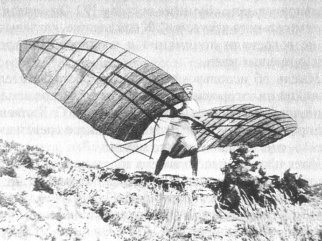
Рис. 5.6. Планер О. Лилиенталя
В 1892 г., стремясь увеличить продолжительность полетов, Лилиенталь построил планер с большим размахом крыла. Дальность полетов действительно возросла, однако из-за большой "парусности" управлять планерами оказалось трудно, особенно при сильном ветре. Поэтому в дальнейшем конструктор избегал строить аппараты с размахом крыла больше 6-7 м.
В 1893 г. Лилиенталь изготовил планер, который стал прототипом всех его последующих монопланов. По конструкции аппарат существенно отличался от прежних машин. "Как особое новшество моих планеров, - писал Лилиенталь, - я применил в этом году возможность их складывания. Крылья образованы ребрами, расходящимися в форме лучей, и могут складываться подобно крыльям летучей мыши. Этим я достигаю больших удобств при транспортировке и возможность хранить их в любом помещении" [283 ]. Развернутые для полета крылья фиксировались легкосъемными продольными нервюрами, заменяя которые можно было изменять кривизну профиля. Для большей прочности крыло поддерживалось расчалками, соединенными с двумя вертикальными стойками на центроплане.
Еще одним нововведением было применение упруго подвешенного горизонтального стабилизатора. Под действием аэродинамических сил он, преодолевая силу действия пружины, мог поворачиваться на некоторый угол вверх, что облегчало быстрое увеличение угла атаки крыла, необходимое для торможения перед посадкой. Нижнее положение задней кромки горизонтального оперения фиксировалось ограничителями так, что в полете стабилизатор всегда был расположен под отрицательным углом к крылу.
На планере-моноплане со складывающимся крылом и подвижным горизонтальным стабилизатором было выполнено много успешных полетов. Стартуя с высоких холмов, Лилиенталь достигал дальности до 250 м и продолжительности 20-30 с. При этом, по словам экспериментатора, "...когда ветер начинал усиливаться, я мог подниматься выше моей нормальной траектории полета и оставаться неподвижно в одной точке в течение нескольких секунд" [73, с. 127 ]. Из-за малой инерционности и наличия стабилизирующих поверхностей аппарат обладал удовлетворительной устойчивостью и чутко реагировал на изменения положения центра тяжести (1).
Как уже говорилось, построенные в дальнейшем монопланы Лилиенталя являлись незначительно модифицированными вариантами хорошо зарекомендовавшего себя планера 1893 г. Основные отличия заключались в размерах крыла и форме профиля. Их испытания проходили на склонах пологих холмов, а также с искусственной насыпи конической формы высотой 15м (построенной в 1894 г. по указанию Лилиенталя), с которой можно было стартовать всегда против ветра, независимо от того, в каком направлении он дул.
Убедившись в сравнительной безопасности экспериментов и удовлетворительных планирующих свойствах своих аппаратов, Лилиенталь в 1894 г. решил приступить к производству планеров для продажи. В качестве образца он разработал конструкцию "стандартного планера". Этот планер имел крыло с размахом 6,7 м и площадью 13 м2. Как и на предыдущих аппаратах, оно могло складываться при транспортировке и хранении. Для повышения устойчивости горизонтальное оперение было сдвинуто назад примерно на 1 м. Была предусмотрена также специальная скоба перед крылом для защиты пилота от удара в случае невыхода планера из пикирования, как однажды случилось с Лилиенталем (2).
"Стандартный планер" О. Лилиенталя был построен, как минимум, в 9 экземплярах. Таким образом, его можно считать первым в истории авиации серийным летательным аппаратом тяжелее воздуха. В 1894-1896 гг. этот планер приобрели Ш. де Ламбер (Франция), А. Вольфмюллет (Германия), К. Франк (Австро-Венгрия), Д. Фицджеральд (Англия), Т. Беннет (Англия), Ч. Браун (Швейцария), Н. Е. Жуковский (Россия), В. Хирст (США) [352, с. 22]. Три из восьми проданных аппаратов сохранились до наших дней: планер Жуковского находится в Научно-мемориальном музее Н. Е. Жуковского в Москве, планер Беннета хранится в Science Museum в Лондоне, а планер, купленный у Лилиенталя Хирстом, демонстрируется в National Air and Space Museum в Вашингтоне.
(1) По оценке, сделанной Ю. И. Новокшоновым, продольный момент инерции планера составлял всего 2,9 кг.м2, а величина Мz го/Jz, характеризующая эффективность горизонтального оперения (без учета короткопериодического движения) была больше, чем у многих других планеров конца XIX - начала XX вв. [86, с. 18-20].
(2) Авария во время одного из полетов произошла в 1894 г. Из-за необычной формы профиля крыла, впервые примененного на аппарате, экспериментатор не смог сбалансировать кабрирующий момент, планер попал в срыв, затем перешел в крутое пикирование и ударился о землю. Благодаря наличию упругой защитной скобы из ивы впереди крыла Лилиенталь отделался легкими ушибами [285].
Помимо пассивных мер защиты конструктор пытался также разработать аэродинамические средства для предотвращения попадания планера в пике. В 1895 г. он запатентовал устройство, представляющее собой расположенные под крылом поверхности, которые могли отклоняться вниз, поворачиваясь вокруг передней кромки крыла [229]. Лилиенталь полагал, что при уменьшении угла атаки давление воздуха снизу уменьшится и указанные поверхности, отжимаемые вниз пружинами, автоматически создадут восстанавливающий момент (на кабрирование). Предложенное решение было, конечно, неудачным из-за резкого ухудшения несущих свойств крыла при отклонении вспомогательных поверхностей опасность полетов значительно возросла.
Серийный планер Лилиенталя был, пожалуй, самой удачной конструкцией основоположника практического планеризма. Не случайно, что после полутора лет поисков новых форм безмоторного аппарата он вновь вернулся к опытам со "стандартным планером". При благоприятных условиях Лилиенталю удавались на нем полеты дальностью до 250 м (рис. 5.7).
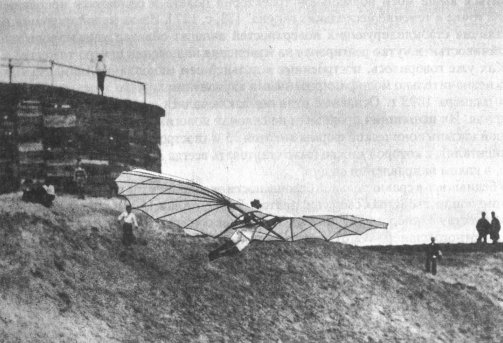
Рис. 5.7. О.Лилиенталь в полете на "стандартном"планере
На планерах-монопланах выполнялись полеты при скорости ветра не более 5-6 м/с. При более сильном ветре ограниченные возможности перемещения центра тяжести уже не обеспечивали надежного управления аппаратом. Попытка уменьшить и без того небольшие размеры поддерживающей поверхности ("Sturmflugelmodell", 1894 г.) не дали положительных результатов. Хотя управляемость и улучшилась, но планирующие свойства из-за малого размаха и возросшей нагрузки на крыло стали хуже.
Проблему удалось решить путем создания планеров-бипланов. "Мне пришла в голову мысль, - писал О. Лилиенталь, - поместить две небольшие поверхности одна над другой с таким расчетом, чтобы обе способствовали парению в воздухе (1). В этом случае получается тот же результат, как при одиночной поверхности, сила подъема которой удвоилась, но которая, вследствие своей незначительной величины, легко подчиняется перемещениям центра тяжести. Мои опыты с моделями показали, что наложение одной поверхности на другую не создает никаких затруднений движению аппарата, лишь бы только верхняя поверхность находилась на достаточном расстоянии от лежащей под ней нижней. Удаление должно быть равно по крайней мере 3/4 ширины крыльев" [73, с. 128-129].
(1) Первоначально Лилиенталь предполагал изготовить планер схемы "биплан-тандем" [229, с. 44], но из-за трудности балансирного управления аппаратом этой схемы он отказался от данной идеи в пользу планера с вертикально разнесенными крыльями. - Д.С.
Первый планер-биплан был построен Лилиенталем осенью 1895 г. По конструкции он имел много общего со "стандартным планером" 1894 г., но вместо одного крыла были сделаны два (рис. 5.8). Крылья имели размах 5,5 м и площадь 18 м2. Верхнее крыло крепилось к нижнему с помощью двух стоек и нескольких гибких расчалок. Полеты на планере-биплане оставили у Лилиенталя благоприятное впечатление.
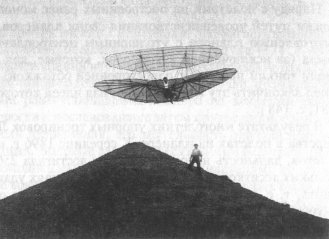
Рис. 5.8. Планер-биплан О.Лилиенталя
"Управление таким двойным аппаратом, писал он, сходно с управлением простыми поверхностями, поэтому я мог, не испытывая новых затруднений, воспользоваться раньше приобретенной опытностью. Большое влияние, оказываемое перемещением центра тяжести и большая безопасность, с которой регулировалось благодаря этому положение снаряда, позволяло мне довериться ветру, достигавшему иногда 10 метров (в секунду. Д.С.) скорости. Произведенные при такой скорости ветра опыты дали результаты гораздо интереснее всех полученных мною до того времени. Начиная с 6-7 метр, скорости ветра я мог покинуть вершину моего холмика и плавно, почти горизонтально, реять в воздухе. При более значительных скоростях траектория полета часто обнаруживает склонность к повышению. В вершине траектории подобного рода аппарат остается довольно долго неподвижным, так что я могу разговаривать в то время, когда нахожусь в воздухе, с лицами, желающими меня сфотографировать... Я вполне ясно осознаю, что в вышеприведенных случаях я поднялся бы вверх, если бы, переместившись немного вбок, описал круг в поднимающей меня струе воздуха. Ветер сам старается произвести подобное движение, и поэтому моя главная цель при нахождении в воздухе заключается в том, чтобы помешать ветру повернуть меня направо или налево, так как я инстинктивно чувствую за и под собой холм, с которого я поднимался и о который сильно бы ударился, если бы дал себя повернуть" [73, с. 130].
Вскоре Лилиенталь изготовил еще один биплан, с крылом большего размера. Он хорошо планировал в тихую погоду, но при ветре управлять им оказалось трудно. Испытания этого аппарата еще раз подтвердили, что для надежного контроля в полете над балансирным планером последний должен иметь небольшие размеры.
В 1896 г. Лилиенталь возобновил полеты на планерах-монопланах. Конструктор не опубликовал причин возврата к прежней схеме. Можно предположить, что, несмотря на высокую оценку летных свойств биплана в печати [73 ], в действительности Лилиенталь не обнаружил заметных аэродинамических преимуществ этого летательного аппарата (1), а в эксплуатации из-за громоздкости, большего веса и сложности сборки он оказался менее удобным. Кроме того, по словам английского планериста П. Пильчера, совершившего полет на биплане Лилиенталя во время поездки в Германию, аппарат был слишком чувствителен к порывам ветра [337, с. 146].
Наряду с полетами на построенных ранее монопланах, Лилиенталь продолжал поиски путей усовершенствования своих планеров. Летом 1896 г. он приступил к изготовлению планера с утолщенным центропланом и двухсторонней обшивкой крыла (за исключением законцовок, которые, как крылья предыдущих планеров, имели тонкий профиль с односторонней обтяжкой) [229, с. 58-59 ]. Лилиенталь не успел закончить эту конструкцию, над идеей которой он работал еще в 1880-е годы [281, с. 148].
В результате многолетних упорных тренировок Лилиенталь достиг большого мастерства в полетах на планере. К середине 1896 г. им было выполнено свыше 2000 полетов, дальность некоторых из них достигала 250 м, а продолжительность - нескольких десятков секунд. В некоторых случаях удавалось подниматься выше точки старта, т. е. совершать парящий полет. Надежно овладев техникой балансирного управления, Лилиенталь отваживался летать при значительной скорости ветра (на бипланах - до 10 м/с).
К этому времени достижения Лилиенталя приобрели широкую известность. Опубликованные в журналах различных стран фотоснимки немецкого планериста в полете служили доказательством возможности перемещения человека по воздуху с помощью неподвижного крыла. Многие приезжали в Германию, чтобы стать очевидцами планерных полетов. Среди тех, кто посетил О. Лилиенталя, были такие известные ученые, как Н. Е. Жуковский» С. Ленгли. И если на первых порах об опытах Лилиенталя еще нередко говорилось в ироническом тоне (2), то к середине 1890-х годов его достижения получили всеобщее признание. Н. Е. Жуковский писал в 1896 г., что планеры Лилиенталя представляют собой "наиболее выдающееся изобретение за последнее время в области аэронавтики" [50, с. 351 ]. Высоко отзывался о заслугах Лилиенталя и известный пропагандист динамического полета О. Шанют [173 ].
Немецкий планерист имел далеко идущие планы. Как писал Н. Е. Жуковский, посетивший Лилиенталя осенью 1895 г., "...он весь был проникнут убеждением, что первое решение воздухоплавательной задачи будет получено парением людей наподобие орлов. До этого, по его мнению, нужно, чтобы образовался воздухоплавательный спорт, подобный велосипедному. Нужно, чтобы при больших городах были устроены конусообразные холмы (около 50 м) с отлогими скатами (от 10 до 20), на которых любители спорта могли бы упражняться в летании" [50, с. 354-355 ]. Стоимость планеров при их массовом производстве должна была быть, по оценке Лилиенталя, невелика - около 200 марок.
(1) Эквивалентный размах биплана с S - 18 м2 составляет 6,6 м, т. е. равен размаху "стандартного" планера-моноплана 1894 г. Принимая во внимание, что вес и лобовое сопротивление у биплана больше, его планирующие свойства должны были быть хуже.
(2) X. Максим называл Лилиенталя "белкой-летягой" [ 164, с. 166], а французские газеты именовали его "парашютистом" [113, с. 54].
Лилиенталю не суждено было стать свидетелем развития планеризма. 9 августа 1896 г. он погиб, упав на планере с высоты около 15 м. Полет происходил при умеренном ветре на многократно опробованном "стандартном" моноплане. После нескольких секунд обычного планирования аппарат неподвижно завис в воздухе, затем неожиданно резко спикировал и ударился о землю. Если бы планер был снабжен защитной дугой перед крылом, экспериментатор, возможно, остался бы жив, но погода благоприятствовала полетам и Лилиенталь счел эту меру безопасности излишней.
Существуют различные версии причин гибели Лилиенталя. Выдвигались гипотезы, что катастрофа произошла вследствие поломки аппарата в воздухе [174, с. 44] или из-за того, что планер попал в нисходящий вертикальный воздушный поток [52, с. 358-359 ]. Однако скорее всего причиной падения было (как и в случае, произошедшем с Лилиенталем двумя годами ранее) попадание планера на закритический режим обтекания из-за потери скорости и последовавшее затем крутое пикирование.
Несмотря на трагическую гибель Лилиенталя, его деятельность оказала плодотворное влияние на развитие авиации. Впервые за много десятилетий безуспешных попыток подняться в воздух без помощи аэростата люди стали свидетелями полетов на управляемом аппарате тяжелее воздуха. Более того, полеты на планерах были не единичными и случайными событиями, а происходили регулярно, иногда по несколько раз в день. Это послужило стимулом для активизации деятельности сторонников динамического летания.
Как известно, Лилиенталь не был первым, кто начал экспериментировать с планерами. Работы по созданию безмоторных аппаратов велись другими конструкторами и в годы его полетов на планерах (1). Но только О. Лилиенталю удалось стать основоположником практического планеризма. Сами по себе аппараты немецкого планериста были еще весьма несовершенны - создавая их по образу птиц, он часто был далек от оптимальных конструкторских решений. Основная причина успеха заключалась в разработанной им методике освоения планерных полетов. Систематичность и постепенность, понимание реальных возможностей планера, упорство в достижении поставленной цели - вот что отличало Лилиенталя от его предшественников и современников. Кроме того, благодаря простоте конструкции своих аппаратов он имел возможность без особых затрат создавать новые, более совершенные образцы. Свою роль сыграл и выбор Лилиенталем балансирного метода управления, позволявшего создавать управляющие моменты относительно всех трех осей. Все это в конце концов привело к положительным результатам.
(1) Среди конструкторов планеров первой половины 1890-х годов можно отметить чешского механика Ф. Штепанека, который, как указывается в работе [274], сумел во время сильного ветра совершить непродолжительный полет на своем аппарате с тандемным расположением крыльев. В указанный период планеры строили также уже известные читателю Г. Кох [259], Л. Харгрейв [352, с. 72], Л. Муйяр [379, с. 255-256]. В середине 1890-х годов в США проводились испытания планера русского эмигранта В. П. Бутузова [174], напоминавшего по конструкции аппараты Ле Бри. Планер Коха остался незавершенным, испытания остальных закончились неуспешно.
Деятельность Лилиенталя является примером плодотворности метода "проб и ошибок" на начальном этапе развития авиации.
Еще при жизни Лилиенталя у него появились последователи. Опыты немецкого планериста проходили в годы, когда многие известные энтузиасты динамического полета были заняты разработкой собственных программ, существенно отличающихся от предложенной Лилиенталем (1), и планеризм не получил такого массового распространения, как рассчитывал его основоположник. Тем не менее есть основание говорить, что к середине 1890-х годов сформировалась интернациональная "школа" Лилиенталя. В Германии опыты с балансирными планерами-монопланами начали А.Вольфмюллер и К. Ято [358, с. 156 ], в Англии - П. Пильчер [337 ], Д. Фицджеральд [253], А. Левентааль [280], Н. Гордон [137], в Польше - Ч. Таньский [260, с. 115-124 ], в США - Ч. Ламсон, А. Херринг, В. Хирст [184, с. 157-174 ], в Аргентине -П. Жуарес [379, с. 229 ], в Австралии - Л. Харгрейв [232 ]; в последние годы XIX в. к экспериментам с балансирными планерами приступил Ф. Фербер во Франции и И. Этрих в Австро-Венгрии. Опыты проводились на планерах, купленных у Лилиенталя, или на аппаратах собственной конструкции, представлявших собой более или менее точное воспроизведение прототипа по фотографиям в печати.
Далеко не все из последователей Лилиенталя проявили необходимое упорство. Многие после первых, не очень удачных проб, оставили занятия планеризмом. Некоторые прервали свои опыты после известия о гибели Лилиенталя. Но были и такие, кто твердо решил не только повторить достижения немецкого планериста, но и добиться большего, улучшая конструкцию планеров и совершенствуя технику пилотирования. Одним из таких энтузиастов был английский инженер П. Пильчер.
Полеты на планерах Пильчер начал в 1895 г. [337 ]. Первый аппарат "Бэт" отличался от монопланов Лилиенталя значительным поперечным V крыла. Благодаря этому Пильчер надеялся улучшить поперечную устойчивость планера. Но то, что было хорошо для комнатных моделей, оказалось неприменимо для полетов на планере - порывы бокового ветра стремились опрокинуть легкий аппарат.
Поэтому в следующей конструкции планера ("Битл") Пильчер отказался от аэродинамического способа обеспечения поперечной устойчивости. Но и этот аппарат оказался малоудачным. Из-за слишком низкого положения центра тяжести (если Лилиенталь как бы надевал планер на себя, то на "Битл" вырез в центроплане отсутствовал и экспериментатор полностью располагался под крылом) он оказался практически неуправляемым. Кроме того, планер был перетяжелен - его вес составлял 36 кг.
Зимой 1895-1896 гг. был создан планер "Галл". Он отличался значительно большими, чем у предыдущих аппаратов размерами (S кр = 28 м2). Опыты с ним еще раз подтвердили вывод Лилиенталя, что с помощью балансирного управления можно надежно контролировать полет только в случае небольших размеров планера. При испытаниях во время ветра "Галл" дважды терпел аварию и Пильчер прекратил дальнейшие опыты с ним.
Наиболее удачным из планеров Пильчера оказался его четвертый аппарат, "Хоук" (рис. 5.9). Он был построен в начале 1896 г. Планер имел много общего со "стандартным" монопланом Лилиенталя: пилот располагался в вырезе в центроплане крыла, шарнирно соединенное с крылом хвостовое оперение при увеличении угла атаки могло под действием давления воздуха отклоняться вверх. Оба аппарата имели однотипную конструктивно-силовую схему крыла. Основное новшество на "Хоуке" заключалось в наличии колесного шасси с пружинной амортизацией. Это создавало удобства при старте (в отличие от Лилиенталя Пильчер предпочитал буксирный метод запуска, обычно с помощью конной тяги), а также смягчало удар в случае грубой посадки.
(1) X. Максим и К. Адер занимались в этот период "доводкой" своих самолетов. Над проектированием самолетов работали также В. Кресс, С. Ленгли, Е. С. Федоров, В. Татен и др.
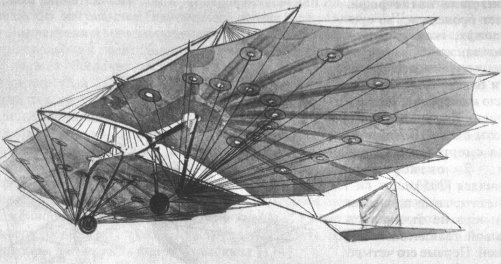
Рис. 5.9. Планер "Хоук" П.Пильчера
Максимальная дальность первых полетов на "Хоуке" достигала 90 м. Год спустя она превысила 200 м (1). Благодаря умеренному запасу устойчивости, небольшим размерам и весу планер хорошо управлялся. Пильчеру удавались на нем не только эволюции в вертикальной плоскости, но и небольшие повороты по курсу. Последнее достигалось при накренении аппарата с помощью отклонения тела вбок (2).
Все отмеченные выше планеры Пильчера имели монопланное крыло. Отрицательное отношение конструктора к планеру-полиплану во многом было обусловлено его неблагоприятным впечатлением о полетах на бипланах Лилиенталя. Пильчер считал полипланы слишком чувствительными к порывам ветра [337, с. 146 ]. Однако, когда в 1897 г. появились сообщения об успешных полетах в США на планерах с несколькими несущими поверхностями [174 ], он решил все же приступить к созданию планера-полиплана. Пильчер первоначально собирался установить на аппарате четыре пары крыльев, но окончательный выбор был сделан в пользу трипланной схемы. Так же как и планеры-монопланы, аппарат должен был иметь балансирное управление [252].
Планер-триплан был изготовлен в 1899 г. (рис. 5.10), но испытать его Пильчеру не удалось. 30 сентября 1899 г. во время третьего в этот день полета на "Хоуке" произошла катастрофа. Полет происходил во время дождя, ткань обшивки намокла, конструкция не выдержала возросшего веса, и балка, соединяющая крыло и оперение, переломилась. Пильчер упал с высоты около 10 м и получил смертельные ранения. 2 октября он скончался [205].
(1) Необходимо, однако, уточнить, что часть пути планер буксировали тросом, свободный полет составлял 60-70 м [254, с. 78]. Эта особенность обычно не учитывается историками авиации.
(2) Как и у планеров Лилиенталя, вертикальное оперение планера Пильчера было сделано неподвижным. Поворот осуществлялся вследствие скольжения при крене.
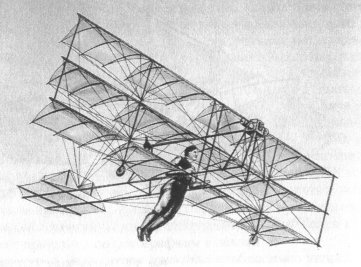
Рис. 5.10. Планер-триплан П.Пильчера
Летательные аппараты Пильчера не отличались большой технической новизной. Первые его четыре планера были сконструированы по образцу монопланов Лилиенталя, а прототипами триплана 1899 г. послужили планеры-полипланы Шанюта и Херринга. Тем не менее работы Пильчера внесли определенный вклад в опыт планеростроения. Они продемонстрировали неприменимость большого поперечного V и очень низкой центровки на балансирном планере, подтвердили выводы Лилиенталя о трудности управления в случае значительной площади крыла и о тенденции аппарата к развороту при крене. Пильчер также впервые успешно применил на планере колесное шасси и буксирный метод старта. Однако в связи с тем, что планеристы того времени старались проводить опыты над мягкой песчаной почвой, эти нововведения не получили тогда распространения.
Планеры лилиенталевского типа являлись первыми практическими крылатыми летательными аппаратами. Однако их конструкция была еще очень несовершенна. Построенные по образцу птиц, они имели крыло замысловатых криволинейных очертаний. Это вело к усложнению конструкции и увеличению веса "скелета" крыла, исключало использование некоторых прочных, но недостаточно эластичных материалов (например, сосны), затрудняло получение стабильных прочностных и аэродинамических характеристик несущей поверхности. Кроме того, из-за большой хорды крыла абсолютные значения перемещения центра давления были велики, что требовало значительных перемещений туловища для балансировки и делало полет на планере весьма утомительным.
В 1895 г. Л. Харгрейв в письме П. Пильчеру обратился с предложением более рациональной конструкции планера [252 ]. Замысел Харгрейва основывался на идее применения недавно изобретенных им коробчатых воздушных змеев. Больший по размерам змей должен был являться крылом, меньший - стабилизатором. Разработанная Харгрейвом конструкция позволила бы заметно улучшить устойчивость, прочность, технологичность планеров. Но английский планерист, к сожалению, не оценил перспективности предложения Харгрейва, и идея "коробчатого" биплана получила распространение только десять лет спустя.
Первый значительный шаг в усовершенствовании планера был сделан группой американских энтузиастов безмоторного полета, возглавляемой Шанютом. В отличие от Лилиенталя и большинства его последователей Шанют не являлся сторонником птицеподобных летательных аппаратов. Он считал также, что балансировка в полете должна обеспечиваться автоматически, а не посредством перемещения летчиком своего тела [173, с. 257]. Все это обусловило значительные отличия его планеров от аппаратов лилиенталевского типа.
Первый планер Шанюта "Катидид" не оправдал возлагаемых на него надежд. Это был аппарат с четырьмя расположенными одно над другим крыльями. Для обеспечения автоматической балансировки крылья были сделаны подвижными в горизонтальной плоскости. Удерживаемые в нормальном положении резиновыми жгутами, они могли под действием порывов ветра поворачиваться на некоторый угол для создания восстанавливающего момента. Испытания показали неэффективность предложенного метода обеспечения балансировки. Кроме того, из-за большой высоты планера (более 3 м) им оказалось трудно управлять. Аэродинамическое качество было низким, и дальность полетов невелика [174 ].
В июле 1896 г. О. Шанют при участии А. Херринга построил новый планер, коренным образом отличавшийся от предыдущего. Этот аппарат (рис. 5.11) стал этапной конструкцией в развитии авиации. Простой, рациональный, легкий и в то же время прочный, он был лучшим балансирным планером своего времени и послужил образцом в конструкторской деятельности братьев Райт и некоторых других пионеров авиации.
Наиболее яркой особенностью планера Шанюта-Херринга являлась конструкция его крыла. Изготовленное из сосны и полотна, бипланное неподвижное крыло имело прямоугольные очертания, ортогональный силовой набор (лонжероны, нервюры, стойки) и диагональную систему расчалок. Последнее из указанных решений, заимствованное Шанютом из опыта мостостроения, было впервые применено на летательном аппарате (1). Благодаря рациональному распределению нагрузок при данной конструктивно-силовой схеме получилась прочная и жесткая бипланная конструкция с малым весом.

Рис. 5.11.Планер-биплан Шанюта-Херринга
Еще одной особенностью планера была конструкция хвостового оперения. Если на аппаратах Лилиенталя стабилизатор имел криволинейные очертания, напоминавшие хвост птицы, и мог самопроизвольно отклоняться только вверх, то оперение биплана Шанюта-Херринга состояло из двух пересекающихся поверхностей шестиугольной формы и могло под действием аэродинамических сил двигаться как в вертикальной, так и в горизонтальной плоскостях. Нежесткое (упругое) крепление стабилизатора предназначалось для демпфирования воздушных порывов и для полетов под углом к направлению ветра. Эффективность оперения могла бы быть довольно велика, но упругая подвеска хвостовых поверхностей ухудшала их стабилизирующие свойства.
(1) Расчалки для поддержания крыла применялись и раньше. Однако принципы создания пространственной конструктивно-силовой схемы существенно отличались. Наиболее распространенной была "пирамидальная" система, аналогичная применяемой на кораблях.
Для того, чтобы облегчить управление планером, были предусмотрены горизонтальные "перила" под крылом, на которые летчик мог опираться локтями и вдоль которых он мог перемещать тело, изменяя положение центра тяжести аппарата. Как видно из рисунка 5.10, экспериментатор располагался в полете на легком подвесном сидении.
Благодаря указанным усовершенствованиям биплан Шанюта-Херринга при равных значениях площади и эффективного удлинения крыла был вдвое легче и значительно компактнее "стандартного планера"Лилиенталя, более удобен в пилотировании (табл. 5.1).
|
Планер |
l,м |
lкр,м |
S кр, м |
* эфф |
m констр кг |
А г.о. |
Х ц.т.потр., мм |
|
Лилиенталя |
4,6 |
6,7 |
13 |
3,5 |
20 |
0,22 |
125 |
|
Шанюта-Херринга |
4,3 |
4,9 |
12,5 |
3,5 |
10,4 |
0,30 |
50 |
В 1896г. с песочных дюн на берегу озера Мичиган на планере Шанюта-Херринга было выполнено около 1000 полетов. Наибольшее число полетов совершил Херринг. Шанют, будучи уже пожилым человеком, принимал участие в опытах только как наблюдатель и консультант.
"Было интересно видеть, - свидетельствовал он, - как авиатор с планером ищет на склоне холма нужного направления ветра, затем делает несколько быстрых шагов вперед, иногда только один шаг, и, приподняв немного переднюю часть аппарата, начинает горизонтальный полет против ветра; видеть, как он, устойчиво и надежно держась в воздухе, движется над наблюдателем на высоте 40 или 50 футов и затем, плавно спускается на землю на расстоянии несколько футов от места старта" [174, с.43].
Максимальная дальность полетов составляла 110м. Хорошо управляемый аппарат контролировался пилотом даже при скорости ветра 14 м/с.
В дальнейшем пути Шанюта и Херринга разошлись. Шанют, захваченный идеей создания абсолютно устойчивого планера, продолжал заниматься аппаратами с поворотными крыльями. В 1902 г. он построил планер-триплан, горизонтальные поверхности которого могли, как на самолете Е. С. Федорова, изменять угол атаки в зависимости от силы скоростного напора [175 ]. Его испытания не дали положительных результатов. Херринг продолжил опыты с балансирными планерами типа описанного выше биплана. В октябре 1896 г. он изготовил увеличенный вариант планера с трипланным крылом [238, с. 70-71 ]. В систему крепления хвостового оперения был включен специальный пневмомеханизм для усиления реакции стабилизатора на внешние возмущения (1)) Дальность полетов на этом аппарате была больше, чем на предыдущих (до = 280 м). Но это произошло не вследствие более совершенной конструкции (триплан Херринга не был "шагом вперед" по сравнению с прототипом), а в результате освоения Херрингом техники поворотов в полете: снижаясь по спирали вокруг холма, планерист имел возможность длительное время двигаться в восходящих потоках. В 1897 г. Херринг вернулся к опытам с планером-бипланом.
(1) Херринг не опубликовал сведений о конструкции и способе действия своего "пневмоусилителя". По его словам, применение данного устройства заметно улучшало устойчивость полета [238, с. 71 ], однако неизвестно, соответствует ли это действительности, так как на следующем планере (1897 г.) он отказался от применения данного механизма.
Основная заслуга Шанюта и Херринга состоит в усовершенствовании конструктивно-силовой схемы планера. Предложенная ими в 1896 г. конструкция бипланного крыла стала впоследствии общепризнанной.
Новый этап в развитии планера связан с именами американских изобретателей братьев Уилбура и Орвилла Райт.
Интерес к планеризму зародился у братьев Райт под влиянием сообщений о полетах Лилиенталя. К моменту начала их работ в авиации (1899 г.) уже имелся определенный опыт планеростроения и полетов на планере. Благодаря деятельности Лилиенталя, Пильчера, Шанюта, Херринга и других были изучены принципы управления в воздухе, разработана рациональная конструкция планера-биплана.
Критически изучив работы своих предшественников, Райты решили взять за основу будущего планера биплан Шанюта-Херринга 1896 г., однако внесли в конструкцию ряд существенных изменений. Наиболее важным был отказ от балансирного способа управления. "Этот способ, - писали они позднее, - казался нам неправильным, так как вес летчика и площадь, по которой он может передвигаться, невелики, а силы, заставляющие планер выходить из равновесия, непременно возрастают, если увеличиваются площадь крыльев и сила ветра. Для больших машин мы хотели применить такую систему, при которой летчик мог бы использовать силу ветра, чтобы вновь восстановить устойчивость, нарушенную тем же ветром" [120, с. 34 ] (1).
Для усовершенствования управления аппаратом Райты решили снабдить его подвижными поверхностями, понимая, что силы, развиваемые аэродинамическими рулями, возрастают при увеличении размеров планера и скорости ветра в той же пропорции, как и возмущающие усилия, и, следовательно, эффективность новой системы управления не зависит от величины машины и условий полета. Данный метод контроля за положением аппарата в воздухе, конечно, нельзя назвать новым. По существу, это был возврат к временам конструирования аэродинамически управляемых планеров (Ле Бри и другие). Однако в отличие от предшественников братья Райт могли опираться на практический опыт планерных полетов. Этот опыт показывал, что помимо продольного управления необходимо иметь возможность управлять наклонами аппарата в поперечной плоскости для устранения случайных кренов и поворотов в нужном направлении.
Принцип аэродинамического способа поперечного управления был "подсмотрен" Райтами у птиц. "Мои наблюдения за полетом сарычей, - писал У. Райт, - привели меня к убеждению, что они восстанавливают боковое равновесие в случае, если порыв ветра нарушает его, с помощью крутки концов крыльев. Если задняя кромка конца правого крыла закручивается вверх, а левая - вниз, птица становится как бы живой ветряной мельницей и сразу же начинает поворачиваться вокруг оси, представляющей собой линию от ее головы к хвосту" [327, с. 15]. В начале Райты предполагали обеспечивать поперечное управление путем одновременного изменения угла атаки консолей крыла в разные стороны [327, с. 8 ], но вскоре пришли к заключению, что более удобным способом является коническая крутка (перекашивание) всего крыла вдоль размаха. Степень деформации зависела от усиления на ручке управления.
(1) Братья Райт были не первыми, кто задумался над необходимостью усовершенствовать управление планером. В 1895-1896 гг. О. Лилиенталь и А. Вольфмюллер рассматривали возможность применения на своих балансирных планерах средств аэродинамического управления [229, с. 34-42, 60]. На недостатки балансирного управления указывал также О. Шанют [174, с. 34-35]. Однако практических успехов в создании новой системы управления добиться в то время не удалось. Основная причина этого заключалась в том, что пилот должен был держаться руками за крыло и отклонять рычаги управления было нечем.
Для проверки нового метода управления летом 1899 г. был построен бипланный воздушный змей с размахом крыла 1,5 м [327, с. 8]. Крылья имели шарнирное соединение со связывающими их вертикальными стойками. Экспериментатор, стоя на земле, мог с помощью нитей перемещать одно крыло относительно другого. При одновременном подтягивании обоих концов верхнего крыла оно смещалось вперед параллельно нижнему, обеспечивая продольное управление змеем, а в случае подтягивания диагонально противоположных концов оба крыла перекашивались и создавался момент относительно продольной оси. Испытания показали работоспособность управления.
Братья Райт были убеждены, что они первыми выдвинули идею управления креном летательного аппарата с помощью аэродинамического средства и впоследствии упорно отстаивали свой приоритет. Однако исследование этого вопроса [67; 218, с. 177-179] показывает, что это далеко не так. Как следует из табл. 5.2, первые предложения по управлению летательным аппаратом относительно продольной оси с помощью дифференциальной крутки крыльев или специальных подвижных поверхностей на крыле или по бокам фюзеляжа были выдвинуты задолго до 1899 г. Большинство из них, как и в случае братьев Райт, было почерпнуто из наблюдений за полетом птиц.
|
Автор идеи |
Страна, год |
Конструкция |
Назначение |
Реализация |
Источник |
|
Гусмао |
Португалия, 1709 |
Крылья по бокам фюзеляжа |
|
|
[200] |
|
Ле Бри |
Франция, 1856, 1858 |
Независимая крутка консолей крыла |
Стабилизация нулевого крена |
На планере |
[333] |
|
д'Эстерно |
Франция, 1864 |
Тоже |
Тоже |
|
.[199] |
|
Боультон |
Англия, 1868 |
Элероны по бокам фюзеляжа |
Тоже |
|
[156] |
|
Харт |
Англия, 1870 |
Элероны на концах крыла |
Тоже |
|
[235] |
|
Ренар |
Франция, 1871 |
Элероны по бокам фюзеляжа |
Тоже |
На модели планера |
[186, с. 120] |
|
Гупиль |
Франция, 1884 |
Тоже |
Тоже |
|
[225] |
|
Гроховский |
Россия, 1891 |
Машущие поверхности по бокам фюзеляжа |
Тоже |
|
[31, с. 491] |
|
Лилиенталь |
Германия, 1895 |
Независимая крутка концов крыла |
Стабилизация нулевого крена, путевое управление |
На планере |
[229, с. 39] |
|
Вольфмюллер |
Германия, 1895 |
Тоже |
Тоже |
Тоже |
[229, с. 39] |
|
Галлаудет |
США, 1898 |
Одновременная крутка консолей крыла в противоположных направлениях |
Стабилизация нулевого крена |
На воздушном змее |
[183, с. 230- 232] |
|
Райт |
США, 1899 |
Тоже |
Стабилизация нулевого крена, путевое управление |
Тоже |
[327] |
Примечание. В ряде публикаций по истории авиации среди предшественников братьев Райт в разработке идеи поперечного управления называют также имена Леонардо да Винчи [86, с. 38], Можайского [47, с. 122; 86, с. 38], Адера [317, с. 455], Монтгомери [354, с. 29], Муйяра [56], Котова [47, с. 135], Неждановского [ 16, с. 17; 129], Федорова [ 123, с. 29]. Как показывает анализ первоисточников, эти предложения были направлены на достижение не поперечной, а путевой устойчивости и управляемости, т. е. предлагались устройства, тождественные аэродинамическим тормозам. Планер Монтгомери 1885 г. имел не элероны, а подвешенные на пружинах закрылки для автоматического демпфирования порывов ветра. Неждановский на своих змеях-планерах вообще не применял подвижные поверхности.
Вначале создание поперечного момента предназначалось только для стабилизации нулевого крена, но в 1890-е годы, когда полеты на балансирных планерах показали возможность поворота при накренении аппарата, данная идея стала предлагаться и для управления (рис. 5.12). Предшественники братьев Райт даже попытались применить систему поперечного управления в реальной конструкции, однако испытать ее действие в полете им по разным причинам не удалось. Поэтому действительная заслуга Райтов в развитии поперечного управления состоит не в разработке идеи и даже не в ее воплощении на летательном аппарате, а в доказательстве работоспособности механизма перекашивания крыла как средства поперечного управления. Ими был также разработан оригинальный механизм перекашивания бипланного крыла (1).
(1) Ле Бри, д'Эстерно, Лилиенталь и Вольфмюллер предусматривали применение механизма перекашивания на монопланах (один из вариантов механизма перекашивания представлен на рис. 5.12). Единственным бипланом с системой поперечного управления был воздушный змей Галлаудета. Однако и в этом случае механизм перекашивания существенно отличался от предложенного братьями Райт - управление должно было осуществляться поворотом лонжерона нижнего крыла вокруг продольной оси, для чего он посредством зубчатой передачи соединялся с находящимся на борту электродвигателем, включаемым по командам с земли.
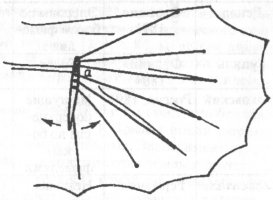
Рис. 5.12. Механизм перекашивания крыла, спроектированный О.Лилиенталем в 1895г.
После опытов с воздушным змеем братья Райт решили приступить к созданию пилотируемого аппарата, предназначенного для освоения навыков управления в воздухе. Он был построен летом 1900 г. Аппарат имел бипланное крыло, по конструкции и размерам схожее с крылом планера Шанюта-Херринга, но в остальном существенно отличался от планеров прежних лет. Помимо наличия системы перекашивания крыла для него было характерно отсутствие хвостового оперения, руль высоты размещался впереди коробки крыльев, экспериментатор должен был располагаться лежа на нижнем крыле. В работах по истории авиации даются различные, часто противоречивые объяснения причин этих нововведений, часто противоречивые объяснения причин этих нововведений. Для того, чтобы внести ясность в данный вопрос, приведем выдержу из доклада У. Райта на заседании Западного общества инженеров (Чикаго, 1901 г.), касающуюся принципов проектирования этого аппарата: "После долгих размышлений мы в конце концов пришли к выводу, что хвостовое оперение скорее является источником неприятностей, нежели помощи, и решили поэтому совсем отказаться от его применения. Логично предположить, что если оператора расположить в полете горизонтально, а не вертикально, как на аппаратах Лилиенталя, Пильчера и Шанюта, то аэродинамическое сопротивление может быть очень заметно уменьшено, т. к. в потоке будет находиться только один квадратный фут вместо пяти (имеется в виду площадь тела летчика, а не всего аппарата. - Д.С.). В связи с тем, что при этом может быть сэкономлено целых 1/2 лошадиной силы (потребной для преодоления сопротивления мощности. - Д.С.), мы решили разместить пилота горизонтально (1). Кроме того, используемый Лилиенталем метод управления, который заключался в перемещении тела летчика, казался нам недостаточно быстрым и эффективным; поэтому после долгих размышлений мы придумали комбинацию, состоящую из двух больших поверхностей, как на планере Шанюта, и меньшей поверхности, размещенной на небольшом расстоянии впереди в таком положении, что действие ветра на нее будет компенсировать влияние перемещения центра давления основных поверхностей. Благодаря этому изменению в направлении и скорости ветра будут оказывать небольшое возмущающее воздействие и от оператора потребуется только управлять машиной, что достигается изгибом передней поверхности вверх или вниз" [327, с. 104 ].
Определенные изменения были внесены и в систему поперечного управления. Если у воздушного змея 1899 г. перекашивание происходило за счет смещения одного конца верхнего крыла вперед, другого - назад, то на летательном аппарате 1900 г. и на последующих планерах Райтов крутка по размаху обеспечивалась с помощью тросовой проводки управления, позволявшей изменять кривизну концевых сечений без продольного смещения крыльев.
Планер имел размах 5,2 и вес 22 кг. Основным материалом его и последующих конструкций братьев Райт являлась сосна, обшивка - полотно. Двухлонжеронное крыло имело необычный профиль, искривленный спереди и почти плоский сзади, что, как надеялись Райты, обеспечит большую стабильность положения центра давления. С этой же целью задняя кромка крыла была сделана гибкой. Стрела прогиба профиля составляла 1/23 длины хорды. Примененная вначале поперечная V-образ-ность крыла была вскоре устранена (как и Пильчер, Райты опасались опрокидывания аппарата при боковом ветре).
Испытания проводились осенью 1900 г. в уединенном местечке Китти-Хоук на побережье Атлантического океана. Песчаная почва и постоянно дующие ветры делали его очень удобным для опытов. Аппарат с человеком на борту должен был запускаться на привязи как воздушный змей. "Мы считали, - писал У. Райт, - что метод экспериментирования на планерах был так дискредитирован смертью Лилиенталя и Пильчера, что лучше практиковаться с аппаратом, привязанным к короткой горизонтальной веревке, и, запуская его, парить в сильном ветре на несколько футов над землей, учиться управлять передним горизонтальным рулем и перекашиванием крыльев для поддержания аппарата в равновесии" [55, с. 55-56 ]. Благодаря этой методике испытаний Райты надеялись добиться многочасовой практики полета, при этом не подвергая себя опасности.
Изобретатели не смогли осуществить свои планы. Подъемная сила крыла оказалась значительно меньше ожидаемой и скорость ветра была недостаточной, чтобы поднять человека в воздух. Поэтому аппарат испытывался почти всегда без пилота, управляемый с земли (рис. 5.13). Непродолжительные пилотируемые полеты удавались только при планирующих спусках с возвышенности после предварительного разбега навстречу ветру. В связи с тем, что пилот располагался лежа и не мог участвовать в разбеге, планер буксировался до скорости отрыва двумя ассистентами, поддерживавшими аппарат за крылья. Посадка происходила на крыло.
(1) Идея горизонтального расположения летчика была применена Райтами по рекомендации Шанюта, который подчеркивал важность данного мероприятия для повышения аэродинамического качества планера [174, с. 47]. Впервые данная компоновка была реализована на безмоторных аппаратах Ф. Уенхема в 1850-е годы, позднее она использовалась на планерах А. Вольфмюллета и Г. Коха.
Из-за недостаточной подъемной силы крыла общее время нахождения братьев Райт в полете за "полевой сезон" 1900 г. составило всего около двух минут. Это было, конечно, слишком мало, чтобы сделать окончательные выводы об особенностях поведения аппарата в воздухе и получить необходимые навыки пилотирования. Поэтому в 1901 г. Райты построили новый планер со значительно большими размерами. Площадь его крыла равнялась 27 м2, размах - 6,7 м, вес -45 кг. Кривизна профиля в соответствии с теорией Лилиенталя была увеличена до 1/12. Система управления осталась старой, за исключением того, что перекашивание крыла осуществлялось теперь с помощью специальных "салазок", способных перемещаться вбок и управляемых движением бедер лежащего на крыле экспериментатора.
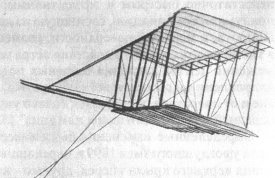
Рис. 5.13. Испытания планера братьев Райт в 1900г.
Новая серия летных испытаний началась в июле 1901 г. На этот раз аппарат испытывался исключительно в свободном полете. Как и в опытах предыдущего года, достигнутые результаты оказались значительно хуже ожидаемых. Несмотря на горизонтальное расположение летчика, планирующие свойства были намного ниже расчетных - угол снижения составлял 10-13 вместо ожидаемых 3 . Кроме того, выявился ряд серьезных недостатков в системе управления. Одним из них была малая эффективность, а иногда и реверс действия руля высоты. Как выяснилось вскоре, это было обусловлено аномальным перемещением центра давления крыла сильно вогнутого профиля при малых углах атаки (назад, по мере уменьшения) (1). Данный дефект удалось устранить уменьшением кривизны профиля крыла до 1/19.
Другим труднообъяснимым явлением была обратная реакция планера на перекашивание крыла. "Мы обнаружили, - писал У. Райт Шанюту в августе 1901 г., - что наша машина ни при каких обстоятельствах не поворачивает в сторону опущенного крыла. Этот очень неожиданный результат опрокидывает все наши теории о методе выполнения разворотов" [327, с. 84 ]. Здесь Райты впервые столкнулись с хорошо известным сейчас эффектом возникновения неблагоприятного момента рыскания при отклонении элеронов или перекашивании крыла. Он объясняется возникновением на конце крыла с увеличенным углом атаки дополнительного аэродинамического сопротивления, стремящегося развернуть аппарат в направлении, обратном тому, которое должно достигаться за счет скольжения.
Во время опытов 1901 г. Райты выполнили несколько сотен полетов. Максимальная дальность планирования составила 118 м. Удавалось совершать полеты при скорости ветра до 12 м/с. Однако изобретатели были еще далеки от окончательного успеха. Несмотря на меры, принятые для улучшения управляемости и уменьшения лобового сопротивления, аппарат 1901 г. не обладал заметными преимуществами перед балансирными планерами прежних лет.
(1) Райты самостоятельно пришли к этому выводу [327, с. 109- 110]. Однако впервые указанный эффект был обнаружен раньше, в опытах Лилиенталя (1895г.) [229, с. 35] и Хаффакера (США, 1899г.) [183, с. 240].
Первый успешный планер с аэродинамическое системой управления был создан братьями Райт в 1902 г. Его постройке предшествовали интенсивные аэродинамические исследования профилей и формы крыла в сконструированной Райтами аэродинамической трубе. Они позволили сделать ряд усовершенствований, направленных на повышение аэродинамического качества будущего планера. Важнейшим из них был переход на крыло со значительно большим удлинением (6,4 вместо 3 на аппаратах 1900 и 1901 гг.), был изменен также профиль крыла. В результате аэродинамическое качество возросло примерно в полтора раза. Это позволило увеличить продолжительность полетов и уменьшить скорость отрыва от земли.
Большое значение имело и усовершенствование системы бокового управления. Убедившись в невозможности контролировать направление полета только с помощью механизма перекашивания крыла, Райты установили на новом планере вертикальное оперение за крылом. Первоначально оно было неподвижным и состояло из двух плоскостей, расположенных параллельно друг другу. Вскоре, однако, выяснилось, что эта мера не обеспечивает устранение нежелательного момента рыскания при перекашивании. Поднятое крыло по-прежнему противодействовало повороту, усиливался крен, и возникала реальная опасность неуправляемого скольжения на опущенное крыло (в одном из полетов О. Райт потерпел из-за этого аварию [327, с. 322 ]). Выход был найден в замене неподвижного вертикального стабилизатора подвижным. Вместо двух вертикальных поверхностей была установлена одна, кинематически связанная с системой перекашивания крыла так, что руль направления автоматически поворачивался в сторону крена (рис. 5.14). Благодаря этому компенсировалась разница в сопротивлении опущенного и поднятого крыла и появилась возможность совершать правильный разворот с креном. Данное техническое решение и другие конструктивные особенности планера были запатентованы в марте 1903 г. [381].
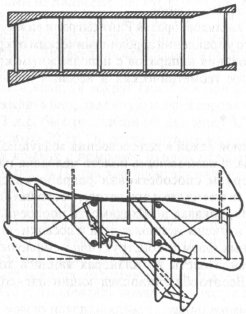
Рис. 5.14. Схема совместного действия перекашивания крыла и руля направления на планере братьев Райт
На планере с усовершенствованной системой управления братья Райт в 1902 г. выполнили около 1000 полетов. Общее время нахождения в воздухе составило 4 л. Лучший полет имел дальность 190 м и продолжительность 22 с [327, с. 319, 324]. Опыты продолжались и в 1903 г., когда была установлена рекордная продолжительность полетов -70 с [327, с. 373 ]. Несмотря на большие размеры и вес (l кр = 10 м, S кр - 30,5 м2, т взл - 120 кг), планер надежно контролировался пилотом даже при ветре 16 м/с. Это доказывало, что на аэродинамически управляемом летательном аппарате эффективность управления не зависит (в отличие от балансирных планеров) от величины и веса машины. И хотя после аварии, произошедшей с О. Райтом, братья не рисковали подниматься высоко от земли и старались избегать поворотов больше, чем на четверть круга, за время полетов они приобрели большой практический опыт и убедились в хороших пилотажных свойствах своего планера. О. Шанют, присутствовавший при полетах, отметил превосходство аппарата Райтов перед всеми построенными ранее планерами [175 ].
Подводя итоги деятельности братьев Райт в области планеростроения, следует подчеркнуть, что основным изобретением конструкторов являлось создание работоспособной системы аэродинамического управления. Хотя Райты и не были первыми, кто предложил управлять креном аэродинамическими средствами, им принадлежит заслуга внедрения этого принципа в практику. Основываясь на летном опыте, они выявили необходимость совместного действия механизма перекашивания и руля направления для путевого управления и создали таким образом первую работоспособную систему бокового управления.
Другие нововведения, сделанные Райтами на планерах - устранение хвостового горизонтального стабилизатора, применение переднерасположенного руля высоты, необычное размещение летчика - не оказались полезными для развития авиации. Отказ от средств обеспечения естественной устойчивости в полете явился ошибкой, осознанной ими десять лет спустя: статическая неустойчивость хотя и повышала эффективность управления, но сильно затрудняла пилотирование и требовала от летчика большого искусства. Горизонтальная поверхность впереди крыла не только не способствовала стабильности полета, но даже ухудшала ее (1). Лежачее положение летчика обеспечивало некоторое уменьшение лобового сопротивления, однако из-за большого общего сопротивления планера (F 3 м2) это было малозаметно и не оправдывало значительных неудобств в эксплуатации.
Несмотря на ошибочность некоторых взглядов, братья Райт сыграли важную роль в развитии авиации. Замена балансирного управления аэродинамическим открывала перспективы дальнейшего совершенствования аппаратов с неподвижным крылом, так как устраняла ограничения в выборе геометрических и весовых параметров планера или самолета.
* * *
Зарождение планеризма явилось важной вехой в деле освоения воздушного океана. Практические эксперименты доказали возможность полета человека на аппарате с неподвижным крылом. Планеризм способствовал разработке средств балансировки и управления при полетах (в том числе и при ветре), позволил выявить взаимосвязь движения крена и рыскания, доказал необходимость поперечного управления. В ходе летной практики были изучены методы взлета и посадки, исследованы достоинства и недостатки различных форм и конструктивно-силовых схем крыла и стабилизирующих поверхностей. Полеты на планерах явились хорошей школой овладения летным мастерством. Все это облегчило следующий шаг - создание моторизованного варианта планера.
(1) В отличие от последующих самолетов схемы "утка" на планерах Райтов она была расположена под отрицательным углом к плоскости крыла, т. е. работала как дестабилизатор.
|